Technoblog homepage: Maciej Paczkowski
electronics and robotics
Minisumo II
Robot - TĘPICIEL
Drugi robot były większym wyzwaniem oraz przeznaczyłem na niego więcej funduszy (< 300zł). Powstał niecały rok po zrobieniu Pakozoida.
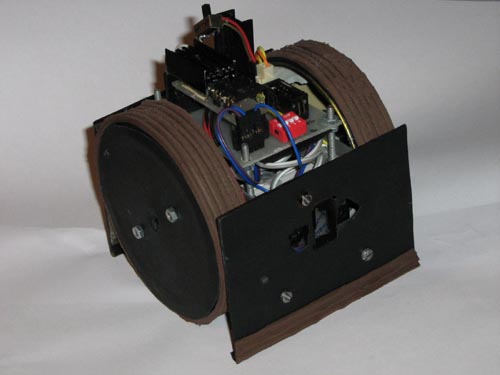
Budowa:
Nauczony poprzednimi błędami wiedziałem że na ringu liczy się przede wszystkim siła.
Stąd pomysł o zakupie bardzo silnych serw modelarskich. Po lekkiej modyfikacji takie serwa świetnie nadają się na silniki do robota mini-sumo.
W pakozoidzie największym problemem było rozpoznawanie końca doho. Trzeba było zainwestować w czujniki CNY70 do rozpoznawania końca linii.
Aby czujnik umiał rozpoznawać kolory trzeba go włączyć w takim układzie:
---- fota
Napęd:
- dwa serwa modelarskie Tower Pro MG-995
Czujniki optyczne:
- czujnik końca planszy - 2x CNY70
- 2 czujniki IR (przód i tył) zbliżeniowe
Procesor:
- atmega 16 SMD
Opis działania:
Jako czujniki ruchu zostały wykorzystane diody IR i fotodioda IR. Z pomocą kolegi Szumiego udało się je polutować i oprogramować na czas przed pierwszymi zawodami. Dzięki Szumi! :)
Tak samo jak w przypadku pakozoida wykorzystałem procesor AVR Atmega16 z tym że w wersji SMD aby zajmował mniej miejsca.
Robot sprawował się bardzo dobrze.
Jako zasilanie miał 4 polimerowe baterie dające prąd rzędu 10A co dawało robotowi niezłego "kopa". Program dla tępiciela był napisany od zera. Idea programu jest taka że musi być on jak najprostszy.
Schemat ideowy elektroniki:
---- schematSchemat ideowy programu:
---- schematDzieci tępiciela :)
Tępiciel posłużył jako pierwowzór do zrobienia całej ligi robotów SKALPowych. ---- LINK
Main
ARMs tips
- Bootloader (C / ASM)
- FNET Bootloader (C)
- SDHC Card via SPI (C)
- FRDM-KL25Z (C)
- OpenWRT on WRT54GL (C)
- Kinetis K60 K70 (C / ASM)
- uConsole on LPC17xx (C)
Electronics - projects
- LED matrix clock v1.0
- LED matrix clock v2.0
- Central heating system
- Servo's tester
- Basic home automation
Robotics - projects
- Minisumo I
- Minisumo II
- Biped I (2007-2008)
- Biped II (2009)
- Biped III (2011-now)
- CNC Machine (2010)
- Robo-cleaner (2011-?)
- Robo-cleaner's enviroment